Introduktion:
Med framväxten av industrin för artificiell intelligens ökar marknadens efterfrågan på interaktionsfunktioner mellan människa och maskin och produktkvalitet, därför designas industriella kartesiska robotar och blir en bra hjälpreda för effektiv produktion.

Arbetsprincip:
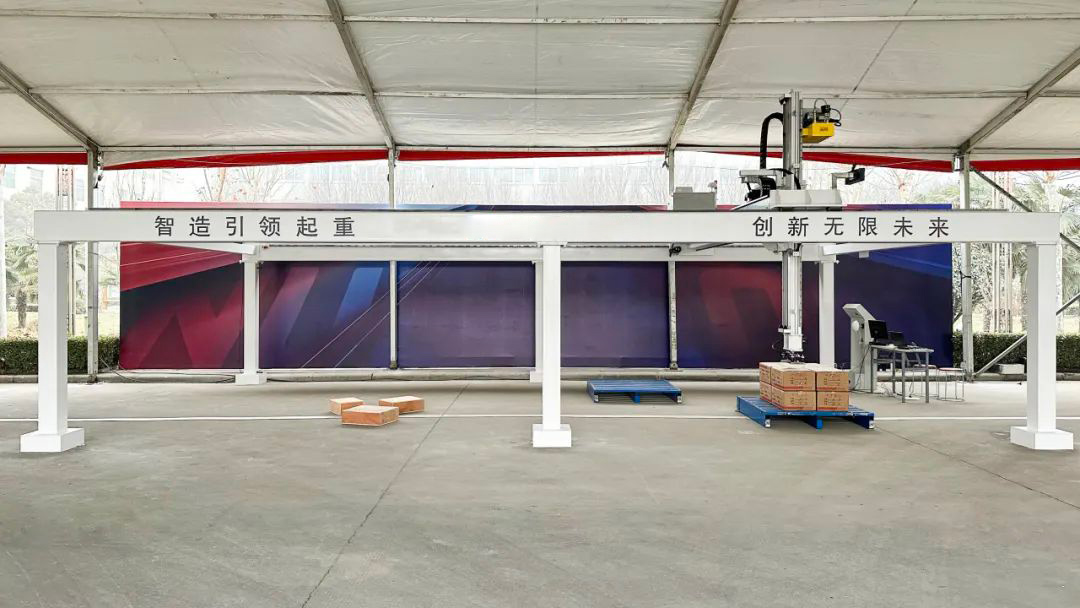
En kartesisk robot, eller en linjär robot eller portalrobot, är en industrirobot med tre linjära kontrollaxlar som är i rät vinkel mot varandra. De tre lederna glider upp och ner, in och ut, och fram och tillbaka, vilket möjliggör handledsrörelse. Axlarna rör sig på ett koordinerat sätt via en rörelseregulator. De tre axlarna är X, Y och Z, och basaxeln stöds vanligtvis längs hela sin längd, medan Y- eller Z-axeln är fribärande.
Ansökan:
Denna portalrobot används ofta inom industriella produktionsområden som dispensering, droppformning, montering, svetsning, sprutning, lastning och lossning, hantering, sortering, palletering, intelligent lagring och transport.
Funktioner:
1. Exakt positionering
Denna kartesiska robot är hållbar, lätt att använda och kan matchas med olika typer av processutrustning och processer. Den har funktionen att lasta och lossa material och använder servodrivning, kuggstångsöverföring och precisionsstyrning av glidskenor, som kan lokalisera exakt.
2. Hög effektivitet
Denna kartesiska robot är ofta ihopkopplad med verktygsmaskiner, transmissionsremmar och silos för att bilda automatiserade produktionslinjer, som fullbordar lastning och lossning, vändning av arbetsstycket och sekvensering av axel-, plåt- och skivarbetsstycken, vilket minskar arbetsintensiteten och förbättrar produktionskapaciteten. , vilket kraftigt förbättrar produktionseffektiviteten och sparar arbetskostnader.
3. God flexibilitet
Fackverksstrukturen i detta robotsystem gör att den kan röra sig och justera fritt, och på så sätt uppnå olika operationer. Denna flexibilitet gör det möjligt för fackverksrobotar att anpassa sig till olika uppgiftskrav, såsom montering, svetsning, hantering, etc.
4. Säker och pålitlig
Denna robot är utrustad med avancerade sensorer och kontrollsystem, som kan övervaka och justera robotens driftstatus i realtid, uppnå högprecisionsdrift och säkerställa stabiliteten och tillförlitligheten i arbetskvaliteten.

